myCobot Pro 600

1 结构参数
1.1 机械臂参数
| 指标 | 参数 |
|---|---|
| 名称 | 大象协作机械臂 商用版 |
| 型号 | myCobot pro 600 |
| 自由度 | 6 |
| 最大负载 | 2kg |
| 工作半径 | 600mm |
| 重复定位精度 | ±0.5mm |
| 重量 | 8.8kg |
| 电源 | AC100-240V ,50/60HZ |
| IP等级 | IP42 |
| 材料 | 铝合金、塑料、橡胶 |
| 工作温度 | 0-50℃ |
1.2 工作空间
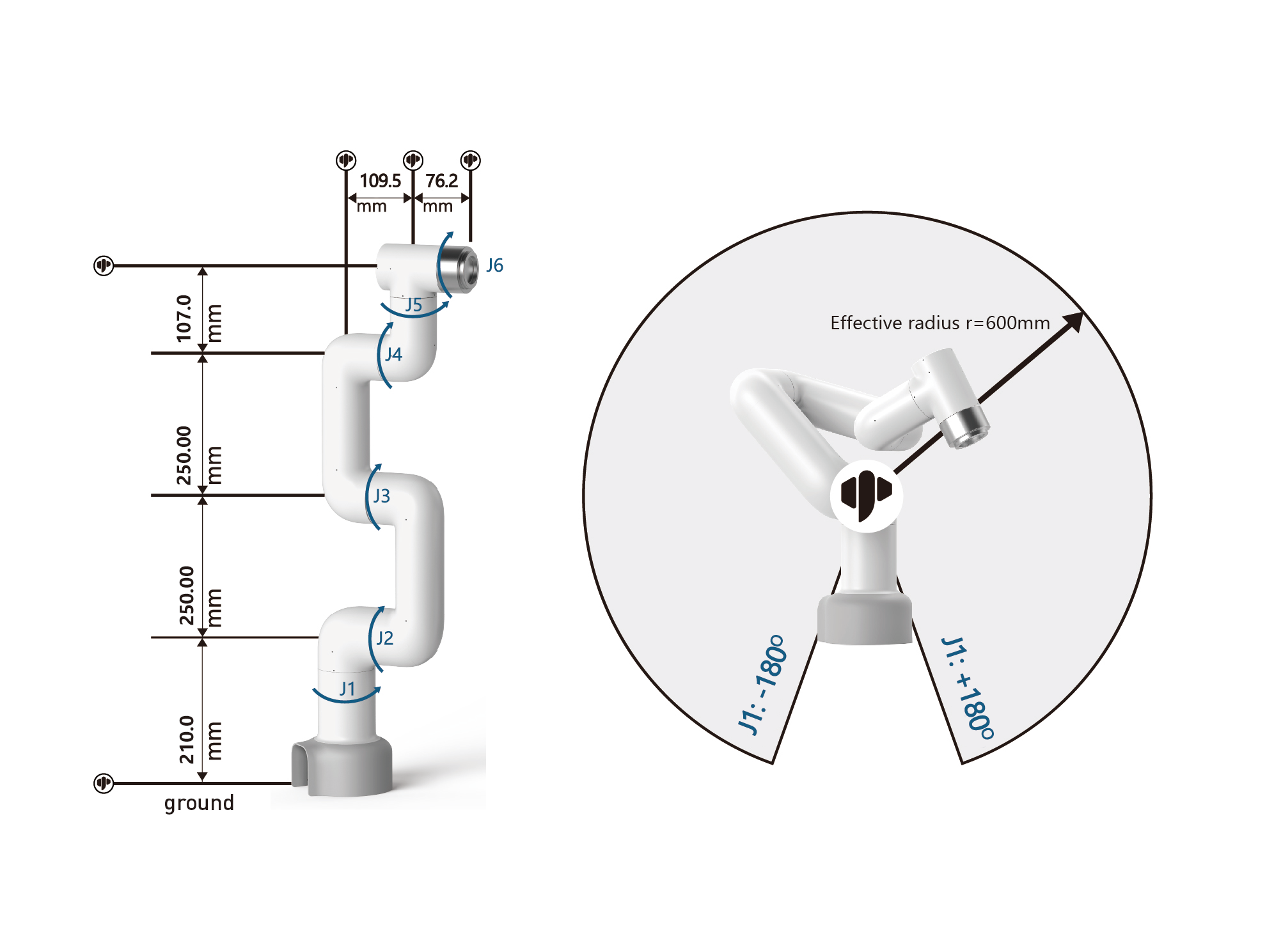
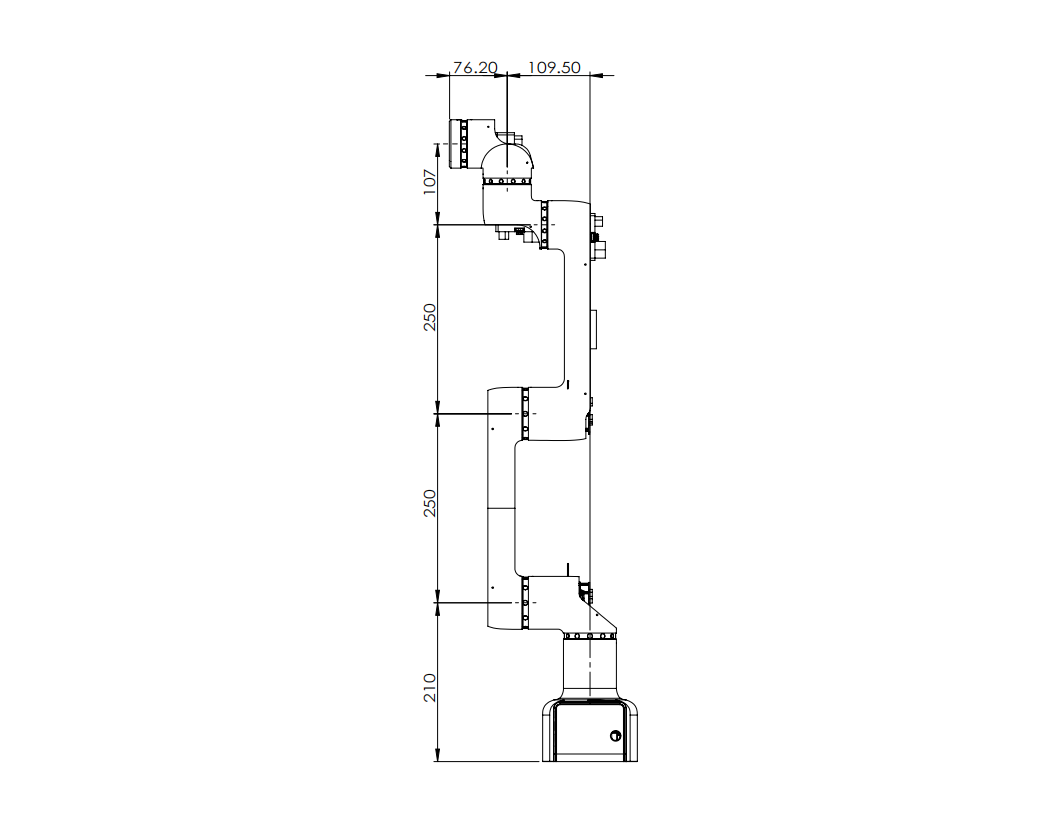
1.3 规格尺寸
1.4 关节运动范围
| 关节 | 范围 |
|---|---|
| J1 | -180° ~ +180° |
| J2 | -270° ~ +90° |
| J3 | -150° ~ +150° |
| J4 | -260° ~ +80° |
| J5 | -168° ~ +168° |
| J6 | -174° ~ +174° |
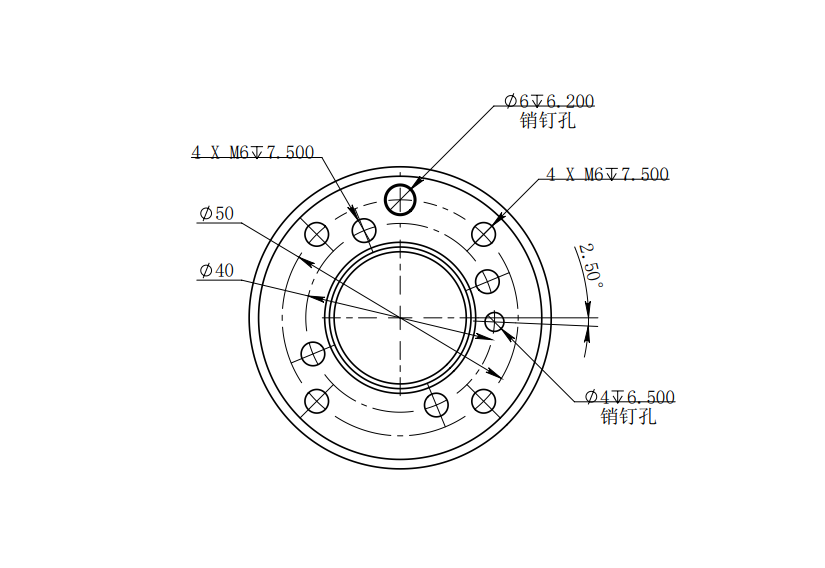
1.5 孔位安装
- 机器人底座安装法兰 底板使用M6螺丝安装方式
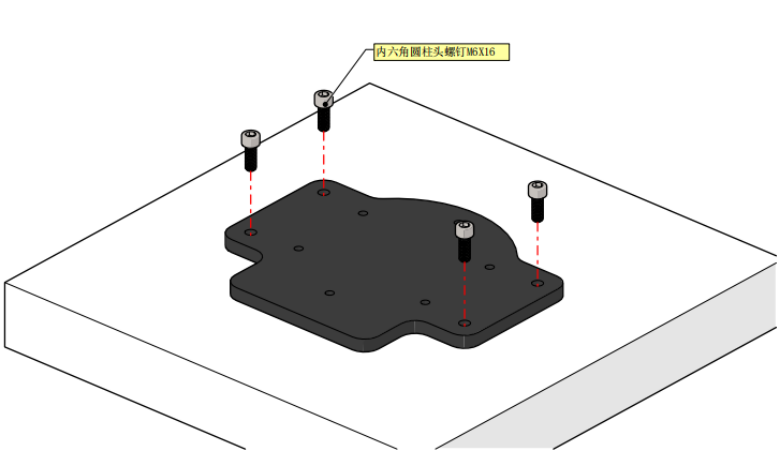
机械臂底座使用M6螺丝安装方式

- 机器人末端安装法兰 机械臂末端螺丝螺纹孔
2 电子参数
| 指标 | 参数 |
|---|---|
| SOC | Broadcom BCM2711 |
| CPU | 64位 1.5GHz四核 |
| 蓝牙/无线 | 双频(24GHZ/50GHZ)IEEE80211B/G/N/AC无线WIF,低功耗蓝牙 5.0 |
| USB | USB3.0 x 2;USB2.0 x 2 |
| HDMI接口 | microHDMI x 2 |
| IO接口 | 12个 |
| 网线接口 | 支持 IEEE 1588千兆 以太网 |
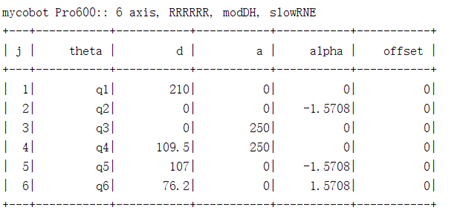
3 DH参数
DH坐标系:
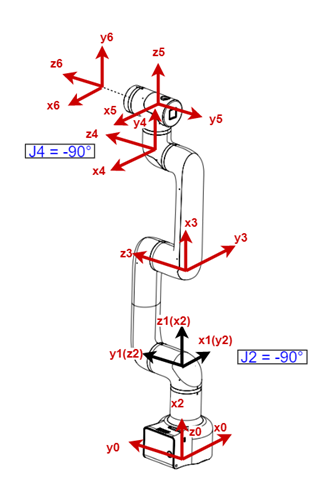
MDH参数表: